Desenvolvimento de um ROV (veículo subaquático remotamente operável) de baixo custo com objetivo didático

Leonardo Aprígio Nascimento Fontes | Oct. 30, 2023
O presente trabalho tem como intuito desenvolver um protótipo de veículo subaquático remotamente operável (ROV), para estudo científico e pesquisas no ramo de robótica subaquática. Para a elaboração deste projeto, foram utilizados componentes de baixo custo e de fácil acesso, o que facilitará sua replicação futura. Os ROVs são veículos subaquáticos não tripulados, capazes de realizar tarefas como manutenções e inspeções, controlados e alimentados por cabos fora da água. e seu desenvolvimento pode ser uma experiência educacional abrangente e enriquecedora, proporcionando conhecimentos em ciência, tecnologia, engenharia, matemática e habilidades interpessoais, além de promover uma maior conscientização ambiental. Além disso, é idealizado consolidar uma base de testes da robótica subaquática no IFS campus Lagarto, disseminando a temática para alunos e comunidade externa, propagando resultados obtidos na forma de relatórios técnicos e artigos científicos.

Introdução ao projeto
A exploração e inspeção subaquática têm desempenhado um papel crucial em diversas áreas, como pesquisa científica, inspeções industriais, resgate de naufrágios e monitoramento ambiental. Nesse cenário, os Veículos Operados Remotamente (ROVs) se destacam como ferramentas versáteis e eficientes para acessar locais de difícil alcance ou perigosos para mergulhadores humanos. Contudo, a maioria dos ROVs comerciais disponíveis atualmente no mercado são de valores elevados, uma vez que o preço médio de um Mini ROV seria aproximadamente de US$2.000 [NAUTICEXPO, 2023], tornando sua utilização inacessível para projetos de menor orçamento, como estudos acadêmicos e iniciativas de conservação. Desse modo, este projeto almeja apresentar de forma clara e concisa a metodologia do desenvolvimento de um ROV de baixo custo.
Objetivos
O trabalho proposto tem como objetivos o desenvolvimento e construção de um Mini ROV economicamente viável e de fácil replicação, para incentivar a colaboração e troca de conhecimentos entre instituições acadêmicas, proporcionando um impacto positivo nas áreas de pesquisa e educação, além de abrir novas perspectivas para estudos subaquáticos mais acessíveis e sustentáveis. Este artigo encontra-se organizado da seguinte forma: a seção 2 apresenta o princípio de Funcionamento do veículo.
Procedimentos metódologicos
O controle dos propulsores é constituído por dois módulos joystick, e dois driver motor ponte H e o microcontrolador ATmega328 prototipado na placa Arduino. Os módulos joystick fornecem valores analógicos que representam a posição do joystick (eixos X e Y), o microcontrolador lê esses valores e os converte em informações de direção e velocidade para o motor. Em seguida, a ponte H, conectada à placa, é responsável por controlar a direção e a velocidade do motor DC. Através do código elaborado na IDE do Arduino, é feito o ajuste dos pinos da ponte H para definir a direção de rotação do motor (horário ou anti-horário) com base nos valores lidos, Além disso, também é é feito o controle a velocidade do motor, ajustando a largura dos pulsos PWM nos pinos da ponte H.
Figura 1 - Esquemático do circuito
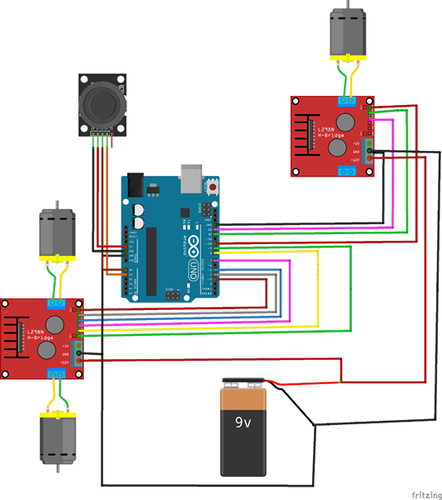
Os propulsores direito e esquerdo, funcionam através de um algoritmo que utiliza uma combinação linear com os valores analógicos fornecidos pelos potenciômetros do módulo joystick (eixos X e Y), o microcontrolador recebe esses valores e os converte em informações de direção e velocidade PWM para o motor, visto na Figura 1 o circuito do sistema de controle e alimentação do veículo. Em seguida, a ponte H, conectada à placa, é responsável por controlar a direção e a velocidade do motor DC. Através do código elaborado na IDE do Arduino, é feito o ajuste dos pinos da ponte H para definir a direção de rotação do motor (horário ou anti-horário) com base nos valores lidos. O terceiro motor, responsável por controlar a profundidade do veículo, é feito através de um algoritmo proporcional, combinando os valores analógicos lidos pelo segundo joystick, o qual possibilita um controle estável de preciso para o veículo.
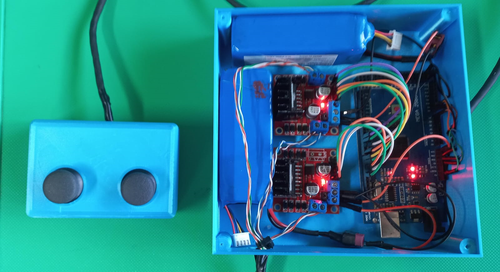
Figura 2 - Circuito embarcado no projeto
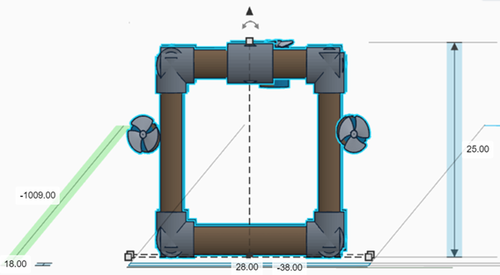
O controle da flutuabilidade dos ROVs é feito com base na alteração da sua densidade. Isso consegue-se através da colocação de materiais mais ou menos densos na sua estrutura. Adicionando materiais mais densos do que a água, o que seria uma espécie de Lastro, é aumentado o peso do ROV fazendo-o afundar, ou seja, fica com flutuabilidade negativa. Pelo contrário, colocando no ROV materiais menos densos do que a água, aumentamos a força de impulsão e consegue-se que o ROV flutue, ou seja, que fique com flutuabilidade positiva. Normalmente, o lastro é posicionado nas zonas inferiores do ROV e os materiais flutuantes nas zonas superiores. O layout da estrutura, é baseada pelos padrões de trabalhos já realizados, os quais tendem a buscar estruturas retangulares, para a obtenção de uma maior estabilidade em ambiente submerso.
Figura 3 - Estrutura do veículo
Resultados Parciais
Os resultados obtidos foram satisfatórios, nos quais os objetivos iniciais foram alcançados, objetivos estes que consistem na criação de um protótipo de veículo que fosse capaz de realizar movimentos em ambiente subaquático através de controle externo, atingindo o básico da construção de ROV, podendo ser visto o protótipo final em ambiente submerso.
Figura 4 - Testes em ambiente submerso

Conclusão
A elaboração de um mini ROV para pesquisas acadêmicas é uma iniciativa altamente benéfica e promissora. Esse tipo de veículo subaquático oferece uma plataforma acessível e versátil, no entanto, demandam tempo e investimento não condizentes com a realidade acadêmica, necessitando de serem realizados de forma a se adequarem aos modelos financeiros e de gestão universitária. O protótipo operacional de ROV, apresentou bom desempenho, sem interferências no sistema de controle e um fácil manuseio, os próximos passos do projeto visa produzir imagens de vídeo de regiões submersas. Também espera-se incluir o como uma ferramenta de aprendizado para o curso de Bacharelado em Engenharia Elétrica, no IFS da cidade de Lagarto/SE.